
.JPG)
Introduction
For a long
time I have been fascinated by walking robots, especially the awesome creations
from Boston Dynamics. Their 26km/h wildcat made the headlines last year. But
quadruped robots like that are something you can’t build by yourself. They
require a huge amount of money and programming skills. Or do they?
Ideas

Most four
legged robots that you can find on the internet use a spider-like leg
configuration, where the legs are symmetrical to the center of the robot. Although
this would be more stable and easier to program, I decided to build a
mammal-inspired robot. Mostly because I wanted a challenge and it leaves more
space for a proper design.
Electronics
The most
expensive parts of legged robots often are the servo motors. Most professional
robots use “smart servos” like Dynamixel or Herkulex. They are in about any way
better than regular servos (torque, speed, accuracy), but normally cost between
60$ and 500$ per piece. And we need twelve of them. For my robot I decided to
use Hobbyking servos instead, which are ridiculously cheap:
http://www.hobbyking.com/hobbyking/store/__16269__hk15138_standard_analog_servo_38g_4_3kg_0_17s.html
I paid around 40$ for them in
total. Despite the price, the quality is pretty good. They don’t have much
trouble lifting the robots weight.
As a servo
controller I wanted to use a Pololu Maestro at first, but had some problems
with it. It did not accept the power supply I was using, which led to servo
jittering and uncontrollable movement. Now I am using an Arduino MEGA, it has
enough pins to control all twelve servos on its own.
As a
battery for the servos I am currently using a 6.6V 3000mAh 20C LiFePo4 receiver
pack:
http://www.hobbyking.com/hobbyking/store/__23826__Turnigy_nano_tech_3000mAh_2S1P_20_40C_LiFePo4_Receiver_Pack_.html.
The Arduino is powered over USB by a Laptop or for untethered testing by a 5V 1A power bank.
http://www.hobbyking.com/hobbyking/store/__23826__Turnigy_nano_tech_3000mAh_2S1P_20_40C_LiFePo4_Receiver_Pack_.html.
The Arduino is powered over USB by a Laptop or for untethered testing by a 5V 1A power bank.
Because the
robots will not be autonomous for the time being, it needs a remote of some
sort. I decided to write an Android app and plug a Bluetooth module into the
Arduino.
In a later
update I added an ultrasonic distance sensor to the robots head, which can be
rotated using a small servo. This way, the robot can scan the environment and could
detect if it will run into a wall.
Mechanical Design
To connect servos
and electronics some kind of chassis is needed. At first I thought about
3d-printing one, but that would break the budget as I don’t have my own printer
and would have to order all the parts. That meant I needed a 2D-like design.
Wood as a material does not look professional enough and aluminum is too heavy,
so I went with acrylic glass.
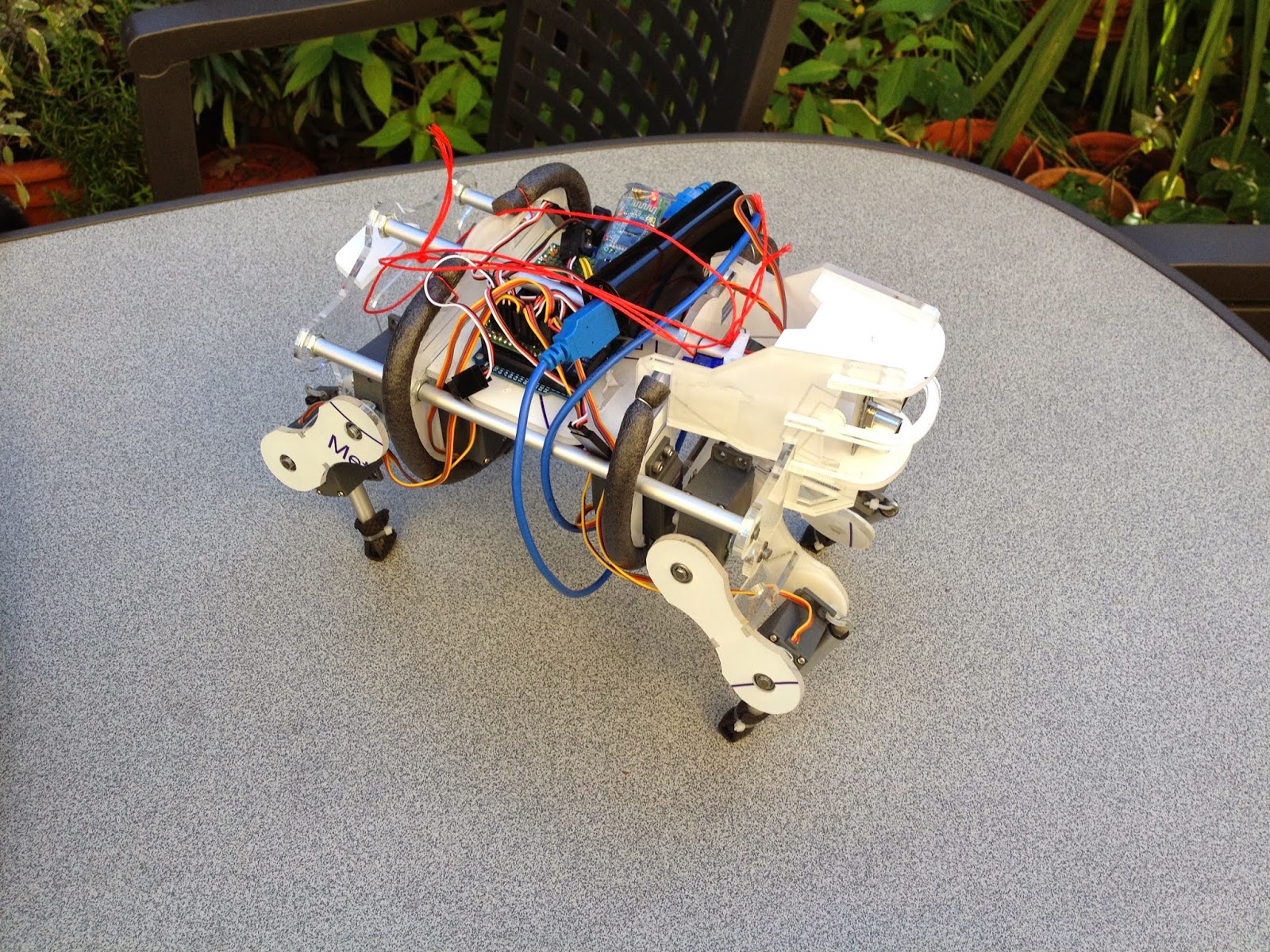
Four
acrylic plates (5mm) form the robot's body. They are connected by nuts on
threaded rods, which are covered in aluminum tubes. The inner plates are
rounded and have foam on the sides to protect the robot when falling over. The
outer plates hold the counter bearings, which are made of a t-nut, a piece of
threaded rod and a small ball bearing. Another horizontal plate serves as a
mount for both the Arduino and the battery. Upper and lower legs are connected
by acrylic parts, also using ball bearings for the joints. On the lower legs I
had to improvise: They are made of cheap camera tripod legs, secured with cable
ties. The rubber ends ensure good grip.


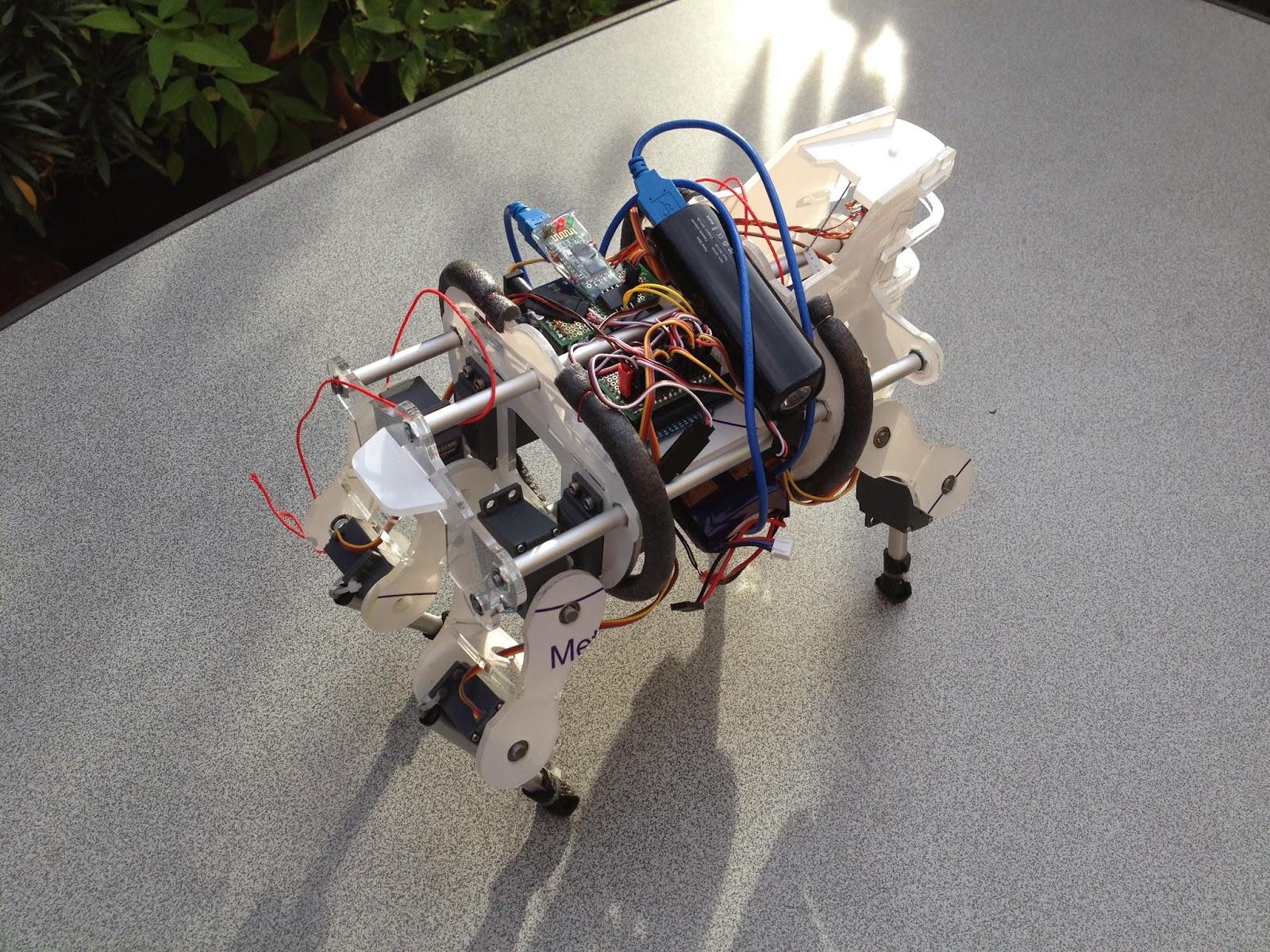
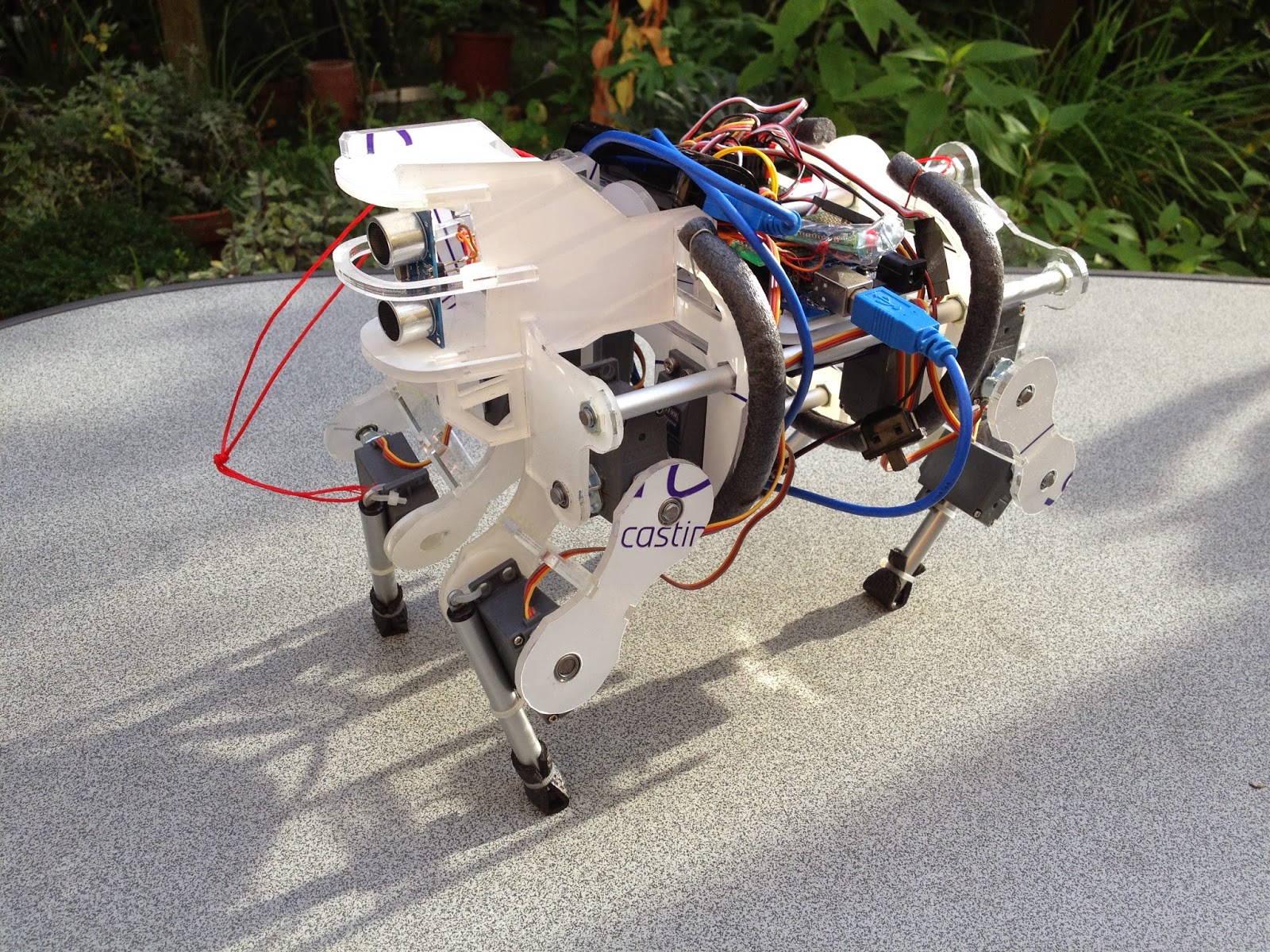
 Every robot
needs a head, so I added that later. The ultrasonic sensor serves as the robots
eyes.
Every robot
needs a head, so I added that later. The ultrasonic sensor serves as the robots
eyes.
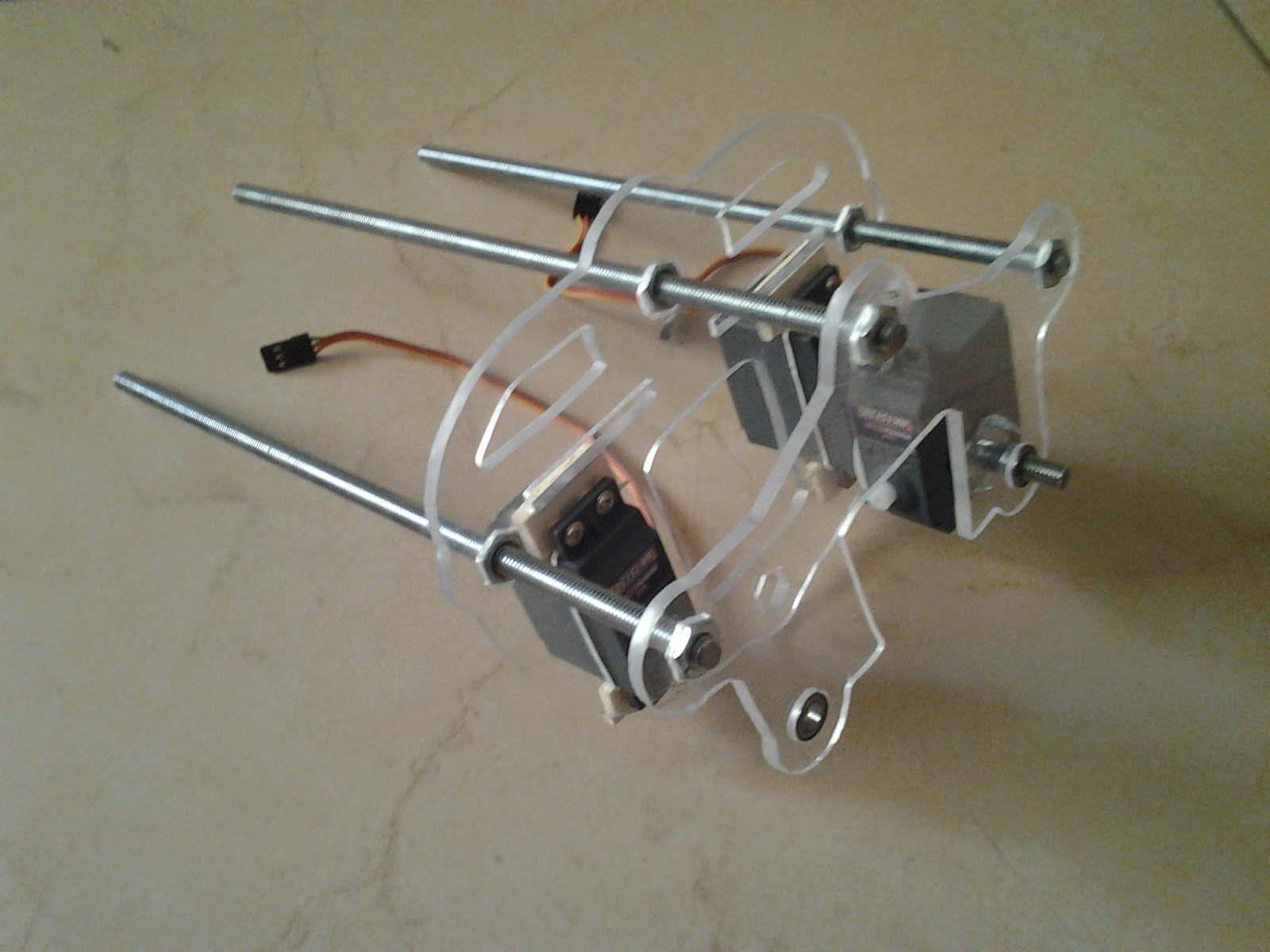
Hand made prototype:

Laser cut parts from Formulor:


The finished robot:



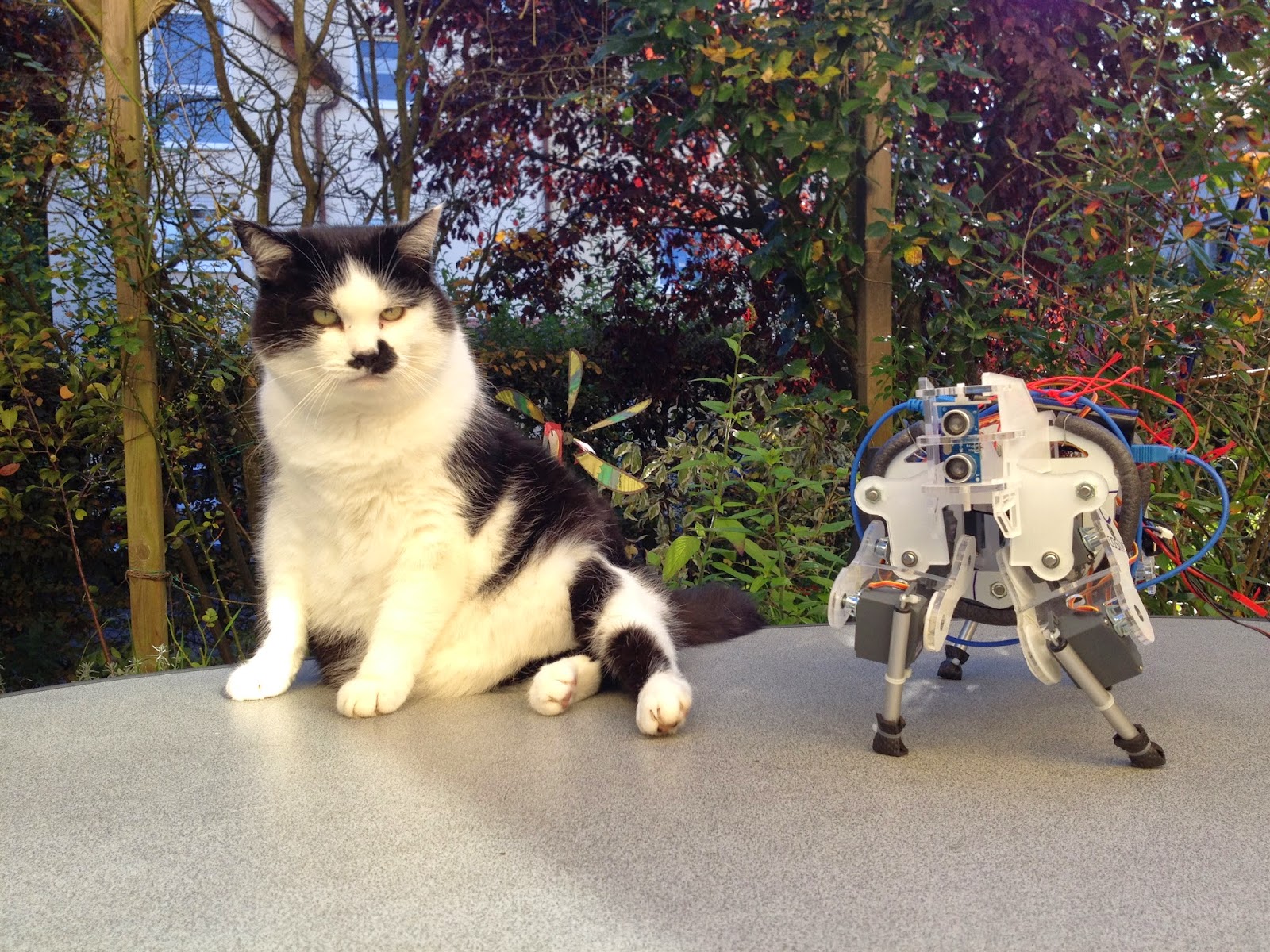
Cat for scale:

Everything
from the first sketches to the final design was done in Sketchup. At first I
made some prototype parts using a fretsaw, which took me hours. Later I decided
to order the parts online and came across Formulor, which offers cheap laser
cut parts and quick shipping. The precision is impressive, even the edgy curves
caused by Sketchup are visible. I somehow underestimated the stability of 5mm
acrylic glass, 3mm should be enough in order to save weight.

The unpowered
robot would fall over immediately, so I made a simple stand for it using a
three-legged stool. Two strings on the front and back of the robot can be attached
to a plastic rod on top of it.
If you want to build the robot yourself, I am providing templates for the mechanical parts:
https://www.dropbox.com/s/qaavo54booxvpmb/Quadruped%20templates.zip?dl=0
Arduino Sketch
The Arduino
sketch is divided into multiple files (tabs): Main, IK, Gait, Serial and Servo.
The main
file calls the other functions and initializes most of the variables.
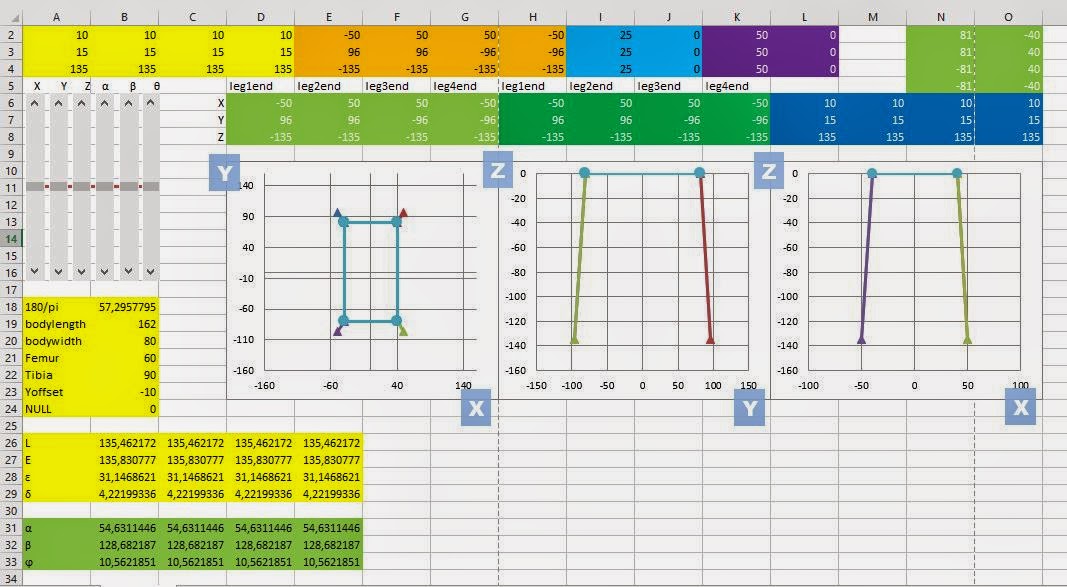
To move the
robots feet you need to calculate the inverse kinematics for each leg. It is
basically an equation where you input coordinates and get servo angles as a
result. You can either use simple school math or search the internet for
solutions. Trying the calculation in Excel before flashing it to an Arduino can
save a lot of time. After this is implemented, the robot can move it's body precisely
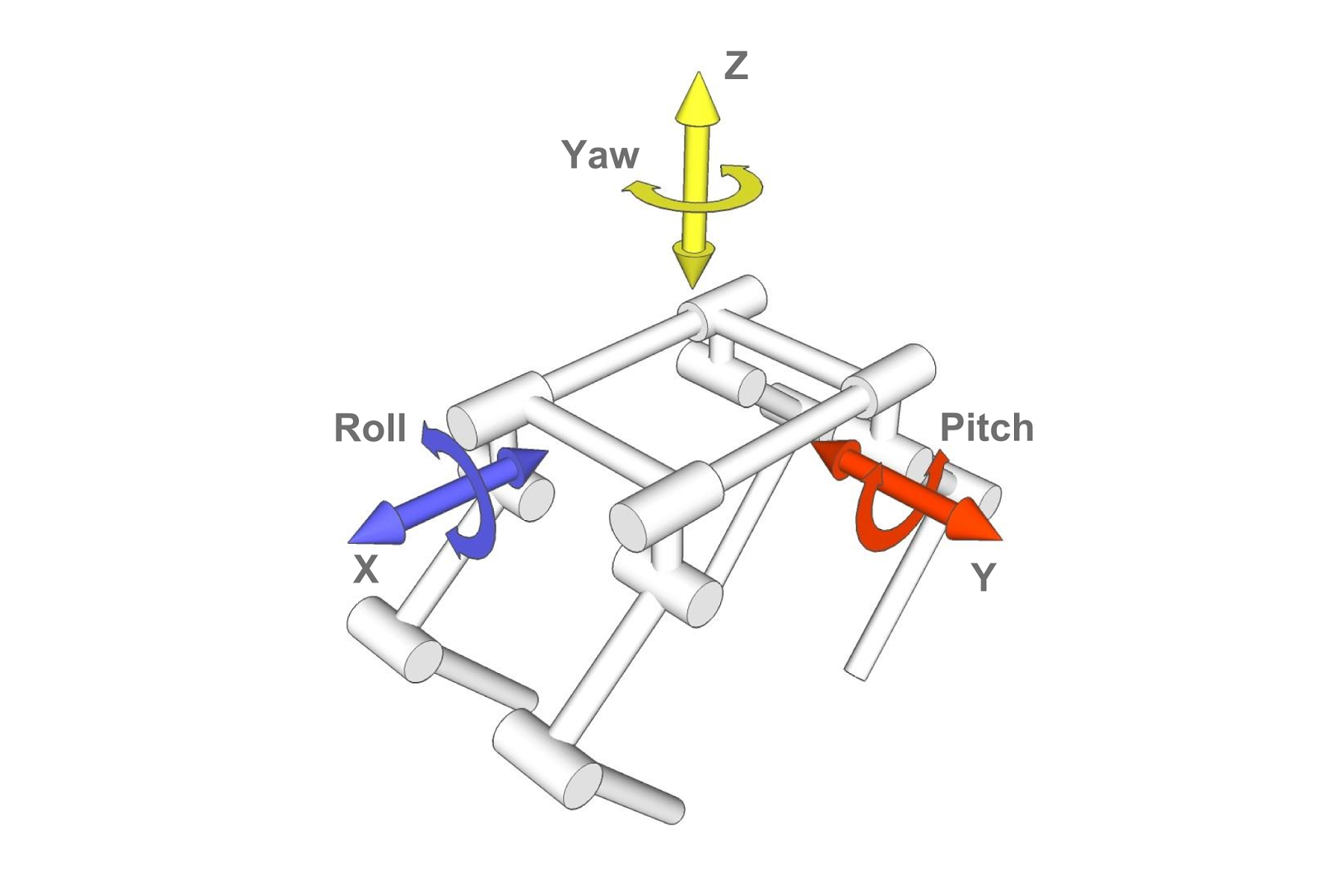
along the XYZ-coordinates. To rotate the robot you need a rotation matrix. This
is another system of equations where you input a coordinate and values for
roll, pitch and yaw and get the rotated coordinate as the output. I found this
blog post by Oscar Liang really helpful: http://blog.oscarliang.net/inverse-kinematics-implementation-hexapod-robots/.
I made an Excel sheet for both calculations:
I made an Excel sheet for both calculations:
The serial
tab manages the incoming data from the Bluetooth module and the ultrasonic
sensor. This works the same way as receiving chars in the serial monitor of the
Arduino IDE.
Servos are
controlled directly using the servo library.
The entire
program works like this: At first the Bluetooth function gets called to look
for new input. Then the right gait function is selected. It calculates the
coordinates for every leg. After that the rotation and translation is calculated.
To get the right servo angles the coordinates have to be converted from “full
body” to “single leg”, then the inverse kinematics function can work its magic.
Finally the servos are moved to the calculated angle.
Walking Gait

I tried to
program a trot-gait later, but the rapid leg movement is too much for the
servos and the frame.
Processing Simulator

I ended up
writing my own simulator. Processing is the perfect choice for this. It has
libraries for graphical user interfaces and can import and render different cad
files. The best thing is that you can practically drag and drop Arduino code
into Processing (This is because Arduino code was originally based on Processing).
There are a few minor differences, for example arrays are initialized differently.
But if you can avoid that you can simulate the exact behavior of the robot and
copy the working code back to the Arduino.
Compiling the Processing sketch only takes around 5 seconds.
Compiling the Processing sketch only takes around 5 seconds.
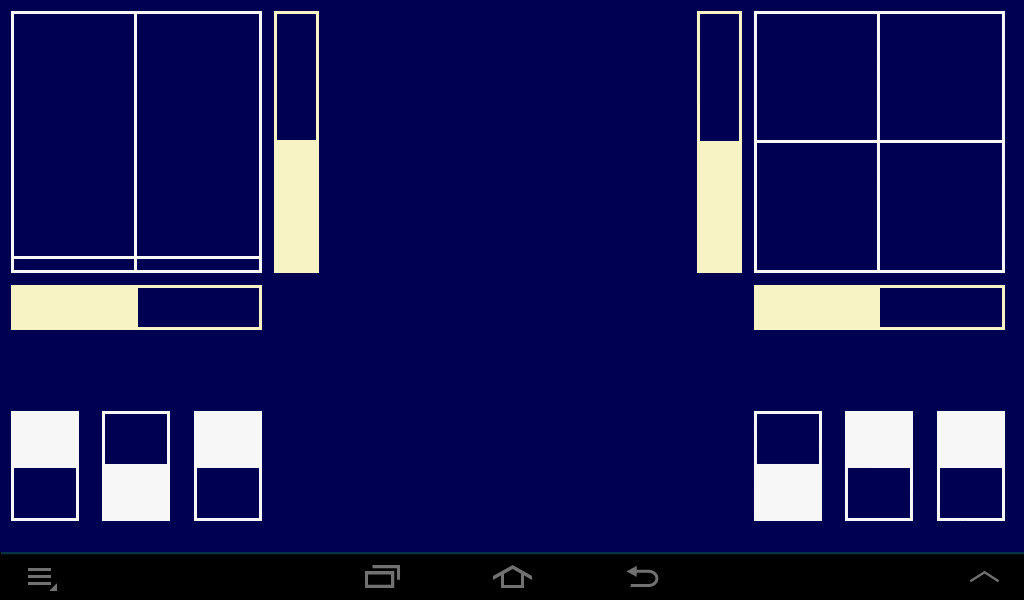
The final
simulator version can display the robot in color, has a user interface with
buttons and sliders, there are different modes for manual servo control and
moving the robot around different axis (I even found a bug in my IK code this
way).
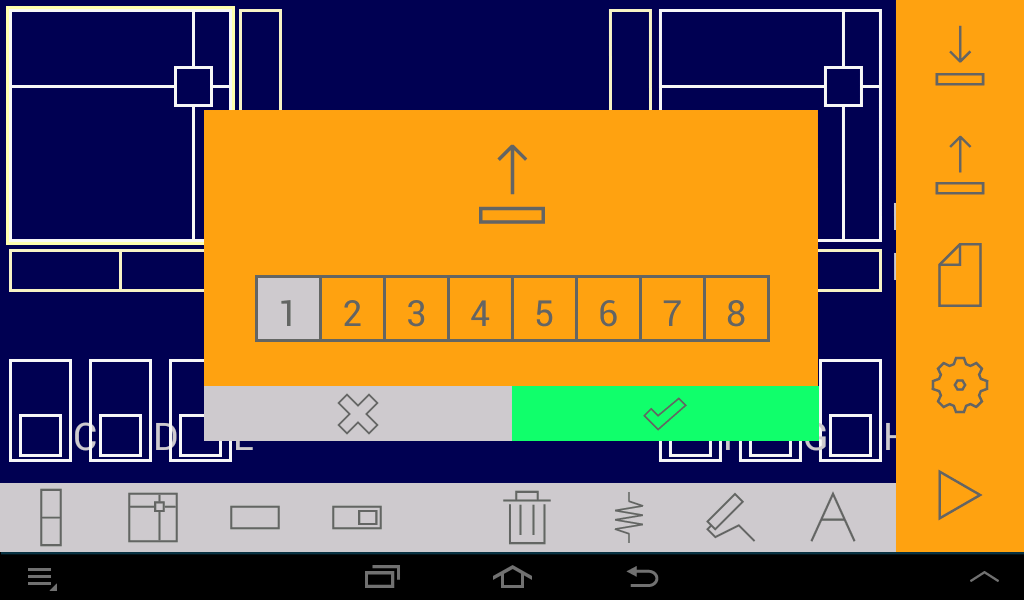
Android App

The only difference
is an additional sonar to display the values of the ultrasonic sensor.
Conclusion
Considering
the low budget I am pretty happy with the robot so far. The stability and servo
power is acceptable. I am already working on more advanced gaits, but even with
the simulator this is a time consuming process.
.PNG)






.jpg)




.jpg)